Víctor Pordomingo, EcosimPro/PROOSIS
The problem of estimating or identifying parameters may be efficiently tackled and solved with the new capabilities of the EcosimPro/PROOSIS optimisation toolbox. The components that are available in the ELECTRIC-SYSTEMS library allow users to estimate the parameters of their electrical simulation models to adjust their response as closely as possible to the real behaviour.
In general, the information manufacturers provide about a given component/equipment item does not include all the information required for the simulation model. The electrical simulation models are based almost entirely on equivalent circuits. Their parameters are not easy to measure or are confidential. Additionally, the available information is generally limited to characteristic curves of the component or equipment item behaviour, such as performance curves for a transformer or torque/slip characteristics in induction motors.
The joint use of the ELECTRIC-SYSTEMS library and the parameter estimator that is integrated within EcosimPro/PROOSIS allows the parameters of the equivalent circuit to be simply and intuitively estimated from the curves provided by the manufacturer. Users can rely on wizards to generate experiments to estimate parameters of the corresponding model partition, which allows the estimate criteria to be established.
Once the estimate experiment has been generated, its simulation will automatically search for the values of the parameters that generate a behaviour of the model as close as possible to the one described by the available curves. The monitor displays the results of the model for those values, and displays the generated curves superimposed on the reference curves.
An example of this used the induction motor and transformer models included in the ELECTRIC-SYSTEMS library to develop a complete process that could simulate and estimate the parameters of a real system. The model consists of four parts:
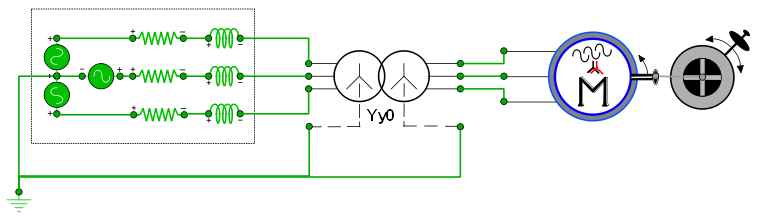
• A power source with outgoing impedance to model the limited power of the system (1906 MVA, 17 KV).
• Three-phase, star-star step-down transformer (17 KV/6.6 kV).
• Dual cage induction motor (2500 KW).
• Mechanical load associated with the pumping system.
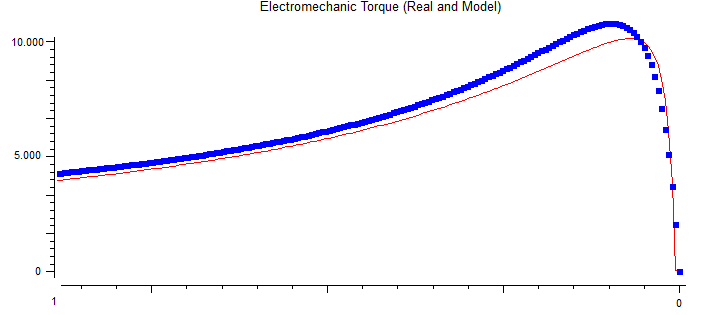
It starts by taking the characteristic driving torque/slip curve for the motor, and then creating a parameter estimation experiment on its model so as to define the resistances and inductances of the equivalent circuit from the electrical model of the induction motor. This yields the following approximation for the corresponding combination of parameters.
The induction motor used is dual-cage and has a star connection. This kind of motor can be type 1 or type 2 according to the caging. The motor used in the simulation is type 2, and its model is based on an analysis on coordinates dq as per the following equivalent circuit:

The parameters to estimate are therefore determined by those circuits, with the values obtained as follows:
![]()
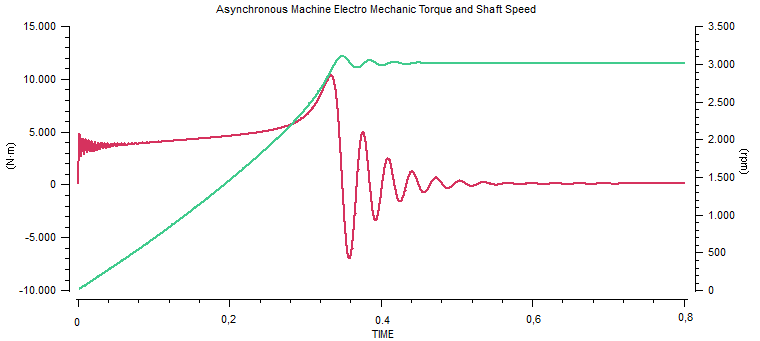
The modeller’s experience is an important factor in configuring the estimator, since he can direct the calculations towards the most suitable values in each case. Once the configuration parameters for the model of the induction motor are known, the system in Figure 1 is modelled configured with those values to contrast the results with the real measurements available on startup times for shaft speed and torque, obtaining the expected results:
As was done with the ELECTRIC-SYSTEMS library, the results can be extrapolated to other fields, and can affirm that the parameter estimator is a significant increase in capacity in any library without having to create new models specifically developed for estimation processes. By starting off with reference curves, the user can easily find the values of the system parameters that best fit the results to the available samples.