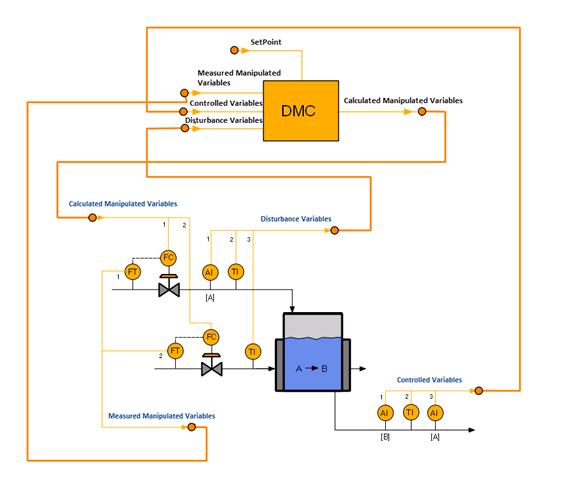
The reactor is fed with certain concentration of chemical A, Ca0, with an input temperature. Inside the reactor, the exothermic reaction A -> B takes place. In order to maintain a desired temperature, the reactor is jacked with a cooler with a volume flow, Fr, and a temperature, Tr0.
The control objectives are:
- Obtain a mass fraction of chemical component A, Ca
- Obtain a mass fraction of chemical component B, Cb
- Maintain the temperature reactor at a selected value
The manipulated variables are:
- The inlet feed volume flow
- The cooler volume flow
The set points of the controlled variables are modified along the simulations:
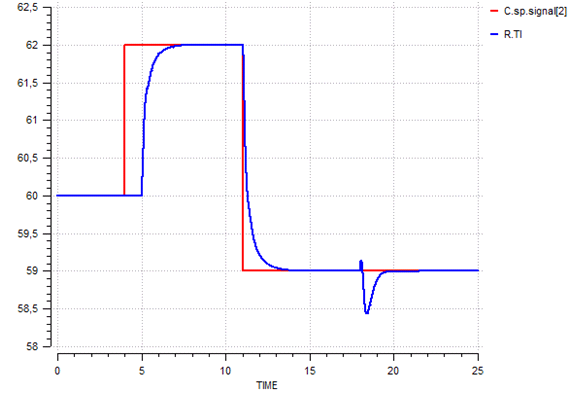
- The reactor temperature set point is increased at 4 seconds and then goes down at 11 seconds
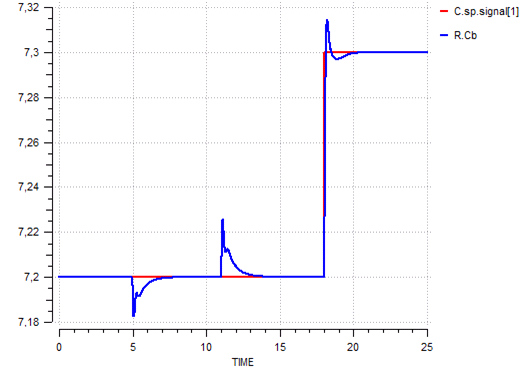
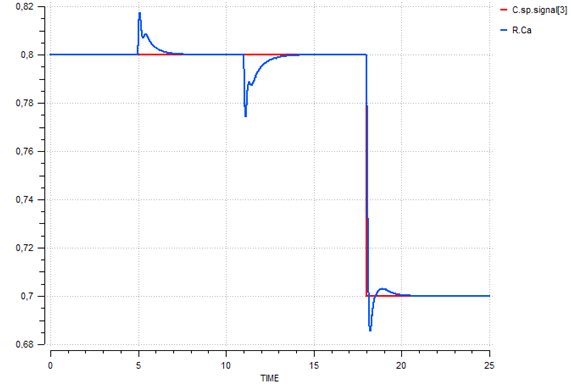
- The set point of chemical B is increased at 18 seconds and, in parallel, the set point of chemical A is decreased
The next figures show the previous set point changes (red line) and the process variable response following the new set points.
Reactor temperature set point and measure:
Chemical B concentration set point and measure:
Chemical A concentration set point and measure:
The DMC controller calculates the evolution of the manipulated variables so that the controlled variables do not divert from their reference.
Manipulated variables: inlet and cooler volume flow.
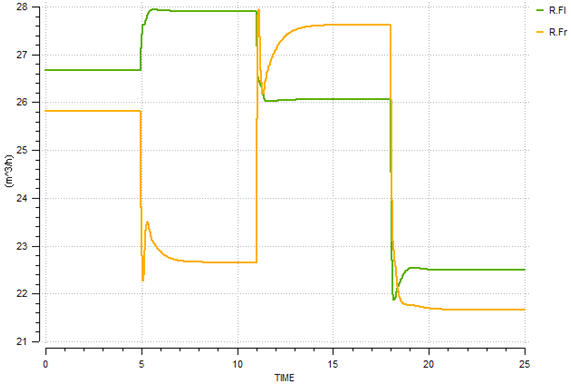
A multivariable system has been easily and efficiently controlled by calculating the optimal sequence of the manipulated variables using a DMC controller.