The ELECTRIC-SYSTEMS toolkit is the ultimate solution for advanced electric systems modelling and simulation. Its range of components includes rotating machinery, transformers, converters, power poles, control and protection devices, and much more. This toolkit provides a complete set of electric, electronic and electromechanical components, including the most commonly used control algorithms, making it easier for the user to concentrate on design and performance. The library’s drag&drop methodology allows for quick creation of wiring diagrams to be analysed, and it is easy to configure and extend. The library is structured into different libraries, each with its own capabilities, allowing the user to model different systems such as electrical generation, distribution networks, power electronics, rotary machines or electromechanical actuators. Whether you’re in Energy, Process, Thermal, Aeronautics, Space, or any other field, ELECTRIC-SYSTEMS is the perfect solution to create and analyse electrical systems.
The ELECTRIC-SYSTEMS toolkit includes necessary libraries and components for electric and power systems modelling and simulation. This toolkit aims to provide advanced electric systems simulation features to EcosimPro and add electric features in any other area: Energy, Process, Thermal, Aeronautics, Space, etc.
The ELECTRIC-SYSTEMS toolkit provides a complete range of rotating machinery, transformers, converters, power poles, control and protection devices, etc. The reversible behaviour of all its models is especially useful in the case of electrical units. Depending on the rest of the system, the same components can be used as both motors or generators.
ELECTRIC-SYSTEMS offers a whole set of electric, electronic and electromechanical components. Moreover, the most commonly used control algorithms are included in the library so that the user can concentrate on the design and performance area.
It is based on electric Differential Algebraic Equations (DAE) describing Electro Magnetic Transient phenomena (EMT domain).
Using drag&drop methodology, the user can quickly create the wiring diagram to be analysed. Its representation is very similar to the physical system. The library has a wealth of possibilities, ranging from the simulation of power generation and distribution networks, transformer stations, power conversion, power electronics, typical control algorithms or digital electronic elements.
Thanks to EcosimPro/PROOSIS features, ELECTRIC-SYSTEMS is very easy to configure and extend, adding any components and characteristics as needed. This can be done graphically through a simple, user-friendly interface, or through EcosimPro/PROOSIS object-oriented language, making it possible to re-use existing codes.
It is structured into different libraries:
- ELECTRICAL: it includes the basic items for circuit design and analysis: Sources, Rs, Ls, Cs, ..
- ELECTRIC-SYSTEMS: advanced extension for electric systems modelling and simulation, including transformers, electric machines, power electronics… Compatible with ELECTRICAL.
- ELECTRIC-SYSTEMS-EXAMPLES: a collection of many examples using the previous libraries offering a valuable starting point for the user.
- Auxiliary libraries: STANDARD libraries are used for a wide range of examples and support in different areas: MATH, PORTS-LIB, CONTROL, MECHANICAL…
Features
The main applications and capabilities of ELECTRIC-SYSTEMS toolkit are listed below:
- Modelling of basic electrical circuits. Analysis of the behaviour of the main circuit magnitudes (currents and voltages in each component). Dynamic and transient behaviours of the circuit are
- Modelling of power systems. The toolkit allows the creation of electrical models that supply large loads, including the large units typically used in this field.
- Development of power electronics systems. The toolkit allows the behaviour of several power systems to be analysed by including typical converters of the main types (DC/DC, DC/AC, AC/DC and AC/AC) and several control algorithms.
- The transformers to model typical real facilities. They act as intermediate stages between the large power sources (power generation plants in this type of model) and the large system loads. In addition, the modelling of high-power systems is completed with the existence of limited power sources.
- Modelling of electromechanical systems: maximum loads, output speeds, consumed power, stability limits, etc.
- A wide spectrum of protection devices formed by selective technology switches. These components are used together with the rest of the library to model facilities to test the response of these systems against network faults and verify the behaviour of the protections.
By means of these components, the user can model different systems such as electrical generation, distribution networks, power electronics, rotary machines or electromechanical actuators.
Components
The library comprises four types of basic components, based on which the user can create higher models by using instances of the same, either by programming graphically or in text mode:
- Static electric machines: mainly transformers and auto-transformers
- Rotary Electrical Machines: Direct Current machines, Asynchronous machines, and Synchronous machines.
- Power Electronics Elements: a wide range of all types of converters (DC/DC, AC/DC, DC/AC and AC/AC) and controlled rectifiers
- Auxiliary components: sensors, mechanical loads, power supplies, three-phase elements, control devices, mathematical and coordinate converters, etc
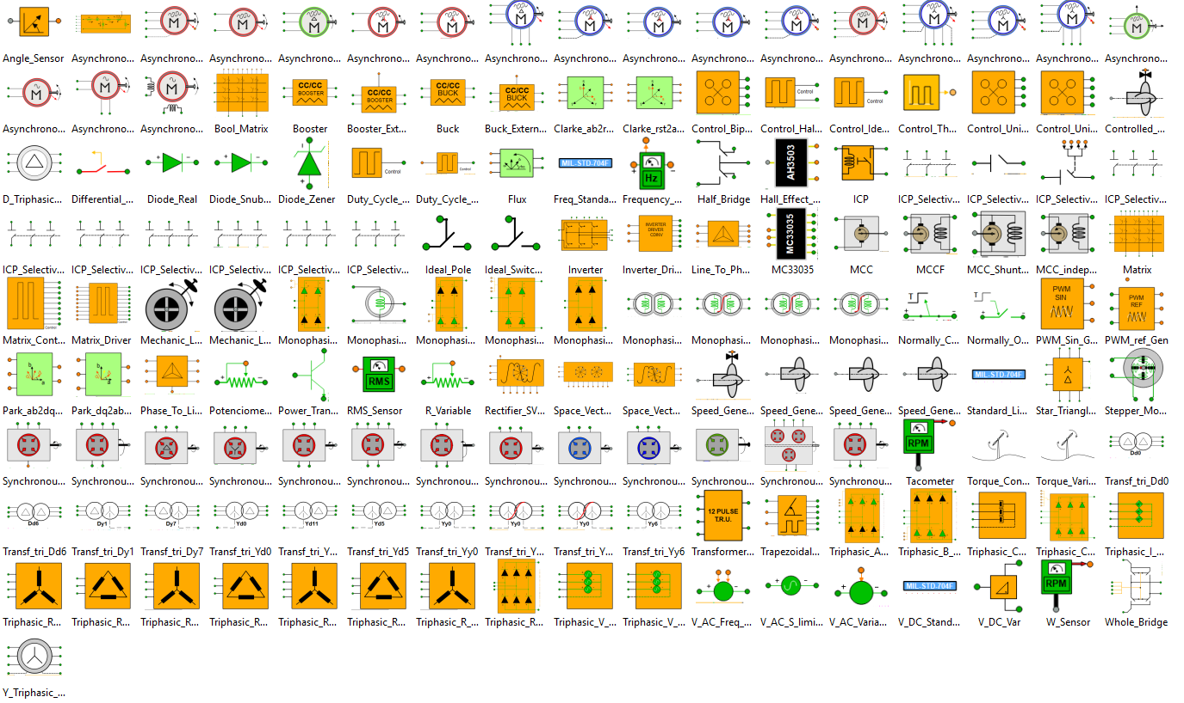
ELECTRIC-SYSTEMS library palette of symbols:
The user case that is shown here models a real pumping system. The pumps are actuated by means of 2500 KW/ 6600 V induction motors. The motor is fed through a 28 MVA and 17/6.9 KV transformer. The main 17 kV busbar has a power of 1900 MVA. This user case can be summarised by means of the following general diagram:
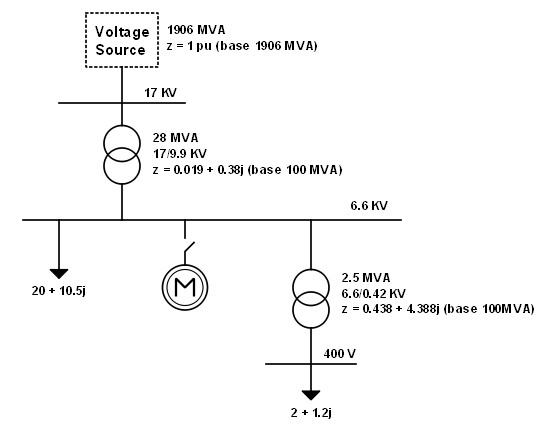
The available components in the ELECTRIC-SYSTEMS toolkit are used to create the following model for the relevant components, and their parameters are configured in accordance with the documentation provided by the manufacturers:
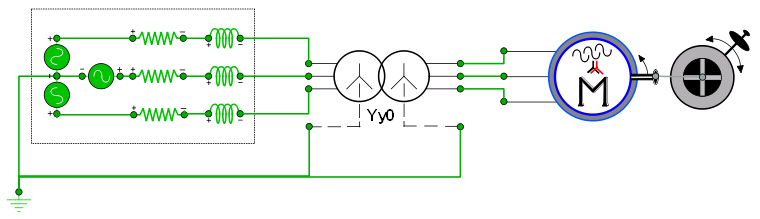
The limited power of the main busbars with the corresponding output impedances. On the other hand, a three-phase transformer with a star-star connection has been used. The motor used is of double squirrel cage rotor type, and the pumps have been modelled by means of the equivalent mechanical load. The dynamic nature of the library allows the startup transients to be simulated and the behaviour of the main system electrical and mechanical variables during critical processes to be analysed.
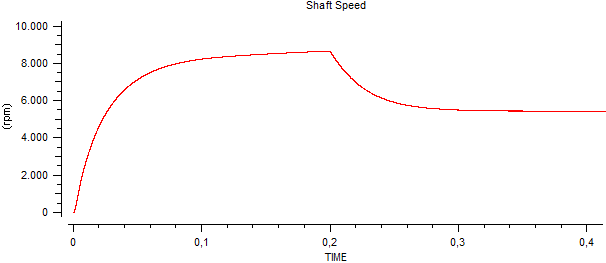
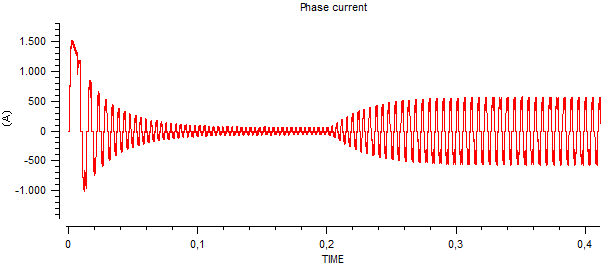
The following figures show, in this order, the behaviour of the shaft speed, the phase current used, the torque generated by the motor and the voltage drop in the 6600 V busbars during the startup process:
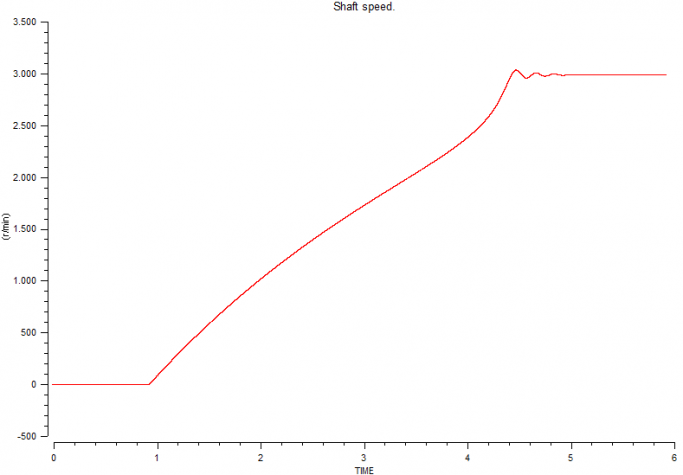
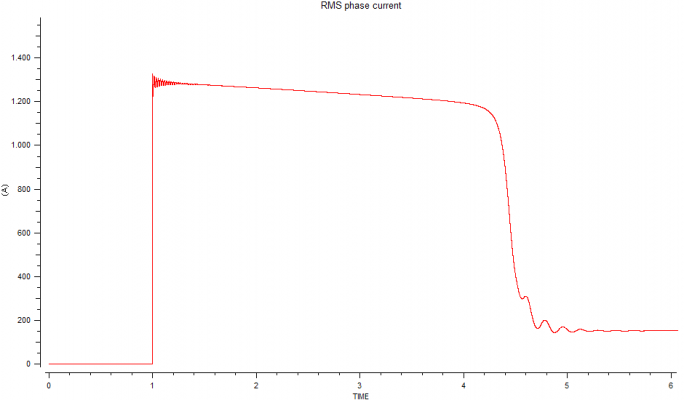
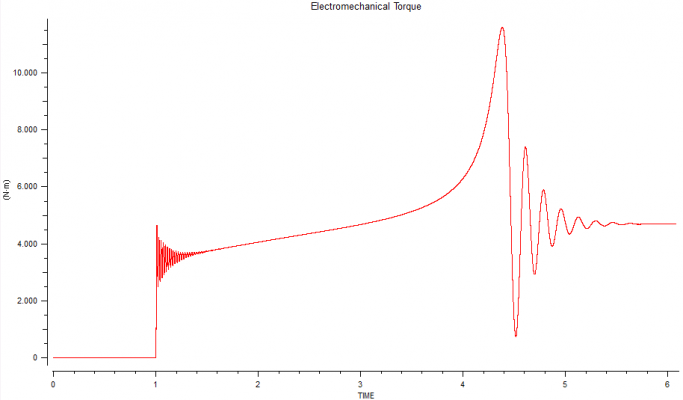
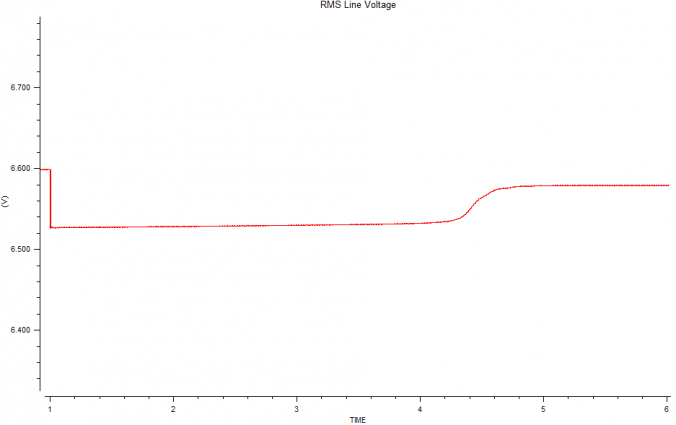
The system is connected in TIME = 1s. The motor uses its maximum power during the acceleration stage, causing a voltage drop in the supply busbars. The highest torque peak occurs once the motor reaches its rated speed. Finally, the system is stabilised, the torque drops and the current is reduced to its rated values as the busbar voltage is recovered.
EcosimPro/PROOSIS includes a powerful optimisation and tool and to estimate parameters that may come in handy to adjust the configuration parameters of the electrical models. Thus, the main motor parameters for the case in the above example were identified.
The EcosimPro/PROOSIS parameter estimator analyses the response curves provided by the manufacturer, taken from real systems or estimated by means of verified procedures. Once these curves are associated to the behaviour of certain model variables, it can provide values for certain component parameters that allow the response that is closest to the reference to be obtained. In the case of induction motors, the torque/slip curves are normally the most common in the market. Furthermore, sometimes startup curves are available for the speed and current.
The data available from the above example was used to complete an estimate of the main motor parameters. To do this, the torque/slip curve was used during a first stage. The process was later repeated using the startup torque curve generated by the dynamic model to more accurately obtain the values of the resistors and inductances in the equivalent model of the motor based on the system oscillations. The model of the double cage induction motor can be represented with the following equivalent circuit:
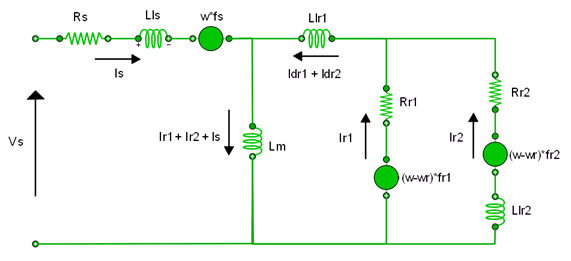
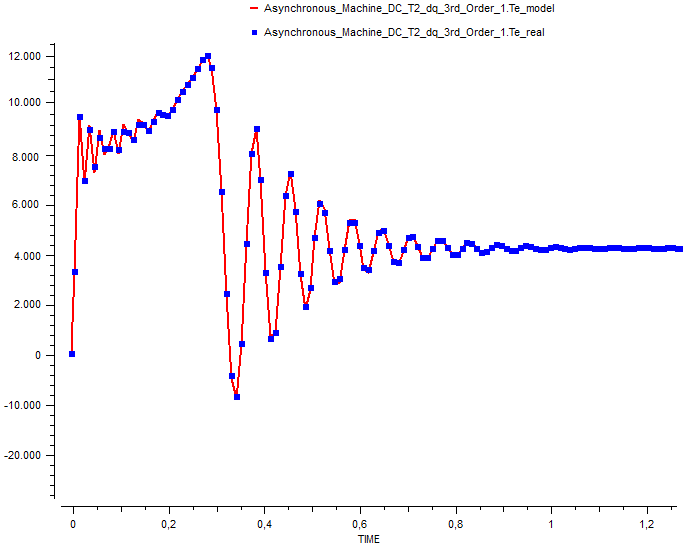
The curve for torque versus time in the dynamic startup model showed the following adjustment for the estimated set of parameters:
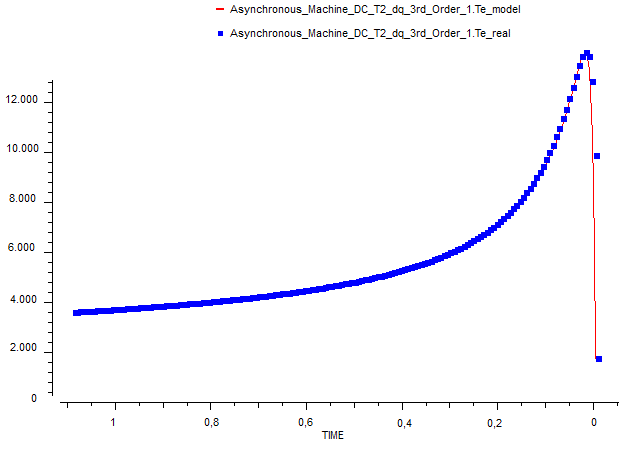
For this set of values, the result obtained for the torque/slip curve is shown in the following figure:
This user case shows the capabilities of EcosimPro/PROOSIS for the joint simulation of both the propulsion system and the electrical system of an aircraft.
The model simulates the following aspects:
- Brushless three-stage synchronous generator.
- AC/DC 12 pulses Transformer Rectifier Unit.
- Low voltage AC loads, high voltage AC loads and DC loads.
- Tuned filter.
- Short-circuits at different levels.
- Selectivity protection system.
- Aircraft propulsion system.
- Constant Speed Constant Frequency Torque supply.
The following figure depicts the schematics of the aircraft propulsion and electrical system:
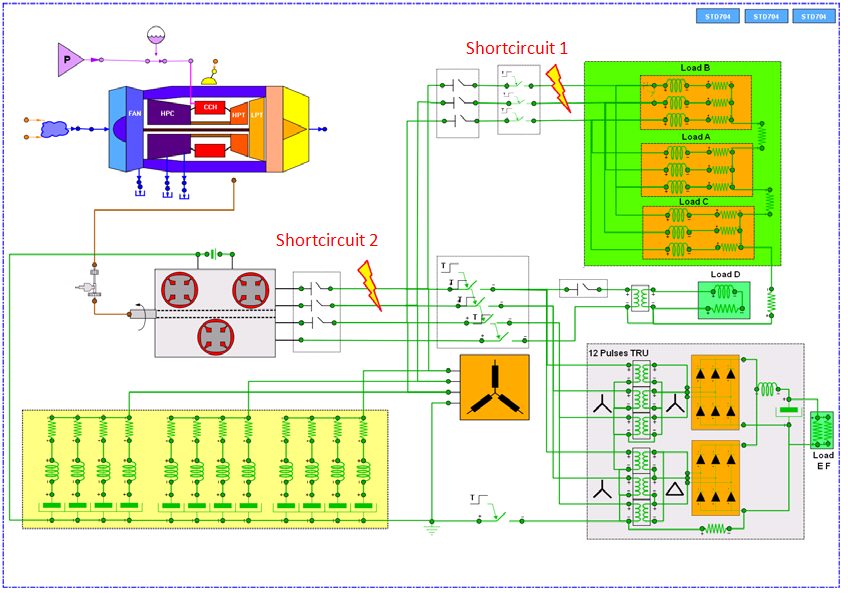
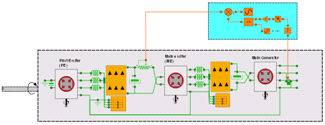
The three stage brushless synchronous generator has been modeled by means of three synchronous generators. The voltage generated in the first one is rectified and used as field excitation for the second one. In the same way, the voltage generated by the second is rectified and used as field excitation for the third. Additionally, a voltage control is used in order to regulate the excitation of the central stage and thus the output voltage. The electrical system runs at 400 Hz, with the main shaft turning at 12,000 rpm. The following figure shows the schematic modeling of the three stage brushless generator:
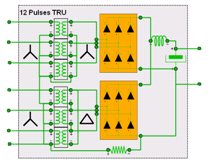
The 12 pulses TRU are modeled by means of Y/YD triphasic transformer and two passive rectifiers.
The voltage control maintains the main voltage within standard limits while the selectivity protection system allows the system to isolate the short circuit origin.
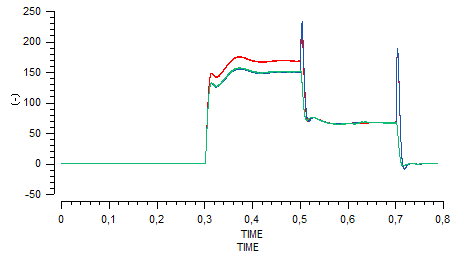
- Upstream shortcircuit: At Time = 0.5s, shortcircuit 1 is isolated at A, B and C 120V AC loads, while the rest of the circuit is still under current (TIME 0.5 to 0.7).
- Downstream shortcircuit: At Time = 0.7s, short-circuit 2 is isolated at main generator output and the whole circuit must be then protected.
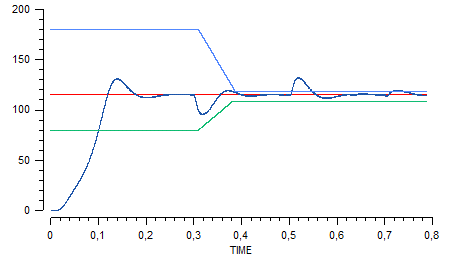
Phase Voltage during generator startup and under short circuits
A, B and C loads phase currents
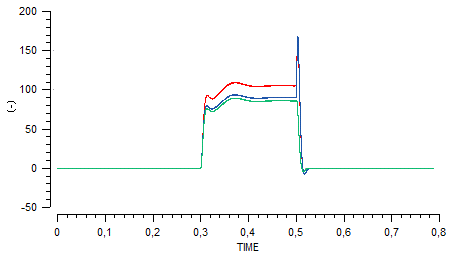
Main generator phase currents
The startup/power generation electrical system of an aircraft is modelled. To do this, a synchronous unit with a brushless-type permanent magnet shall be used. The unit shall be powered from a distributed current source (batteries) until the assembly reaches enough speed for the main motor to reach the necessary compression to operate independently. On the other hand, once the main motors are in operation, they will be rotating the assembly. Under these circumstances, the operation of the unit shall be reversed, so that it starts operating as a generator to feed the electrical system of the aircraft.
The developed model focuses on the startup phase and its trapezoidal current control. The goal is to reach a speed of around 9000 rpm. To do this, the useful cycle required for the PWM control of the poles is established by experimentation. Modulation by pulse width provides added control: The position of the rotor establishes what transistors are active, while the PWM control makes the active transistor remain open for part of its activity and closed the rest of the time. This control may be applied in the top part of the inverter, the lower part or both. In the model that has been developed, it is applied only to the top part. Thus, the model of battery startup system with a synchronous unit with a permanent magnet developed in EcosimPro/PROOSIS with the ELECTRIC-SYSTEMS toolkit follows the figure set out below:
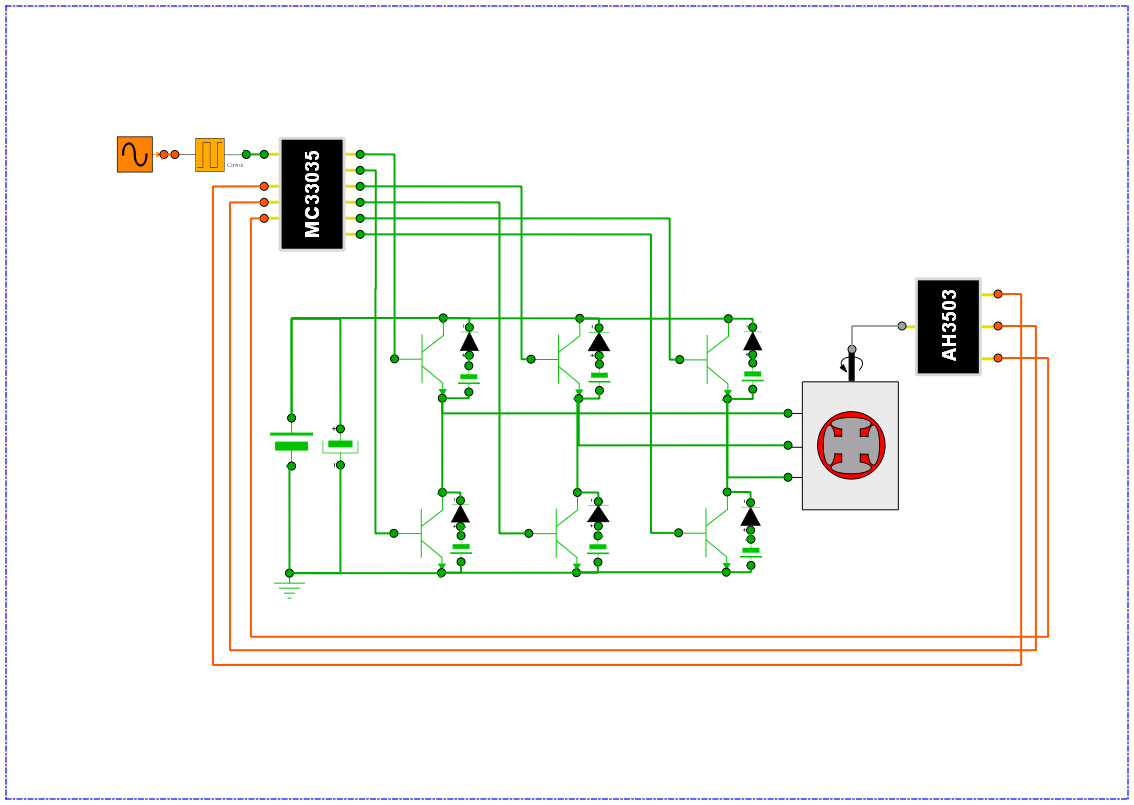
The inverter has been modelled by means of ideal transistors and diodes with a serial resistor and a given threshold voltage.
On the other hand, a Hall effect position sensor has been modelled to provide a digital 3-bit output of the rotor angular position. In addition, the trapezoidal controller applies the corresponding pulses to each pole of the inverter in accordance with the rotor position and to the corresponding PWM modulation.
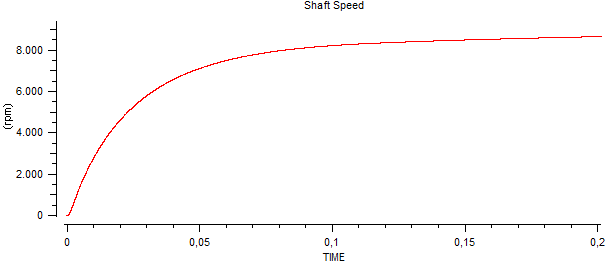
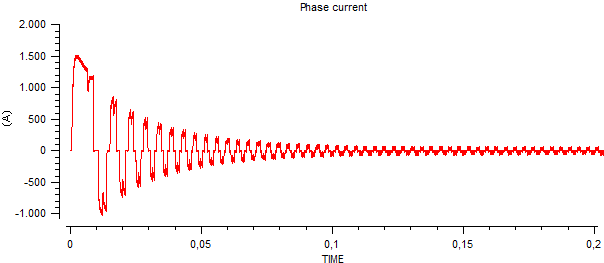
Once the model has been described, the results obtained are analysed. Firstly, the evolution of the speed during startup is shown. It becomes stable at a steady state value of around 9000 rpm. The useful cycle allows the power produced by the engine, and therefore the steady state speed with a given load, to be modified. The value of 72% has been taken as definitive.
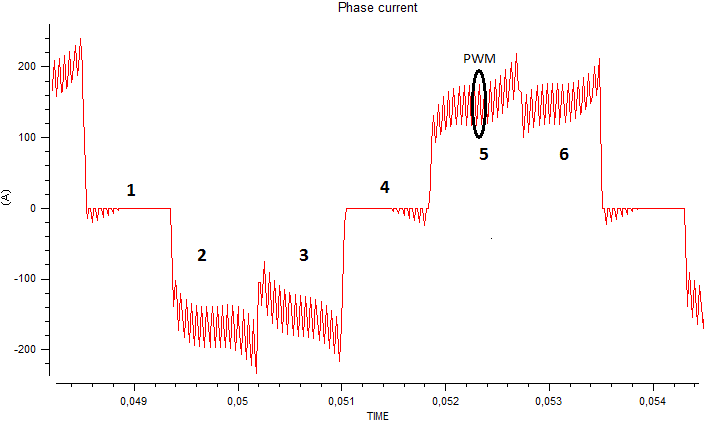
The following chart shows how the current is reduced as the unit accelerates and the induced generated voltage increase. Furthermore, the shape of the domes surrounded by flat areas of zero current coincides with the values expected with a trapezoidal control. It can be seen that each section is formed by six different sections that correspond to each of the six poles of the inverter.
The following detailed capture shows the PWM high-frequency switching and the six switching states of a complete cycle that correspond to the six poles of the inverter:
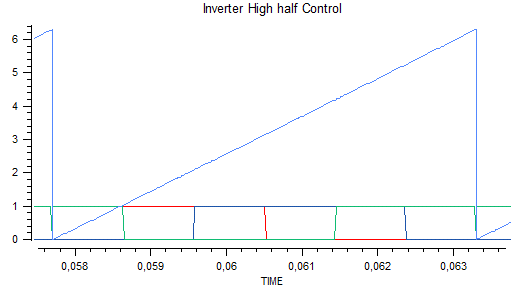
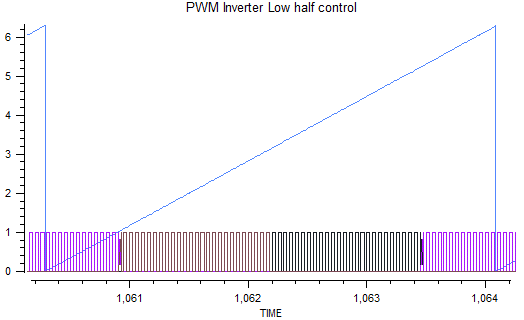
The EcosimPro/PROOSIS Monitor allows the operation of the model and its control to be studied in more detail. The chart below shows the control of the top part of the inverter with a useful cycle of 100%, while the following chart shows the control of the lower part with PWM and a useful cycle of 65%, both of them overlapping a turn of the rotor (2Π radians).
The influence of the mechanical load applied on the shaft is studied at a later stage. The simulation shows the reduction in speed and the increase in current consumption to generate the required traction capacity.