J.M. Zamarreño, R. Martí & C. de Prada, Valladolid University (UVA) & F. Carbonero, V. Pordomingo, EcosimPro/PROOSIS
In the industry these days it is becoming increasingly necessary to simulate complex systems. These systems are often modules that require individual testing, both at simulation level, and also as a physical prototype or plant testing. To perform these physical tests by module, it is not necessary to have all the elements in place ready for use; it is enough to have one of the components (the engine, for example) and the rest can be simulated by computer (eg. control, the plant, etc). This incorporation of a physical element into a simulation environment is what is known as HIL (Hardware In the Loop).
EcosimPro | PROOSIS has incorporated a model export mechanism for use in a HIL system. By means of a DECK, the model can be easily exported to Simulink, and once there, via the Simulink Coder tool, a package is obtained that is ready for use on National Instruments PXI platforms.
The University of Valladolid (UVA) in Spain, in collaboration with National Instruments, has carried out a series of tests to check the process from beginning to end, from the EcosimPro model to the final test with software and hardware elements.
Specifically, two different configurations were used:
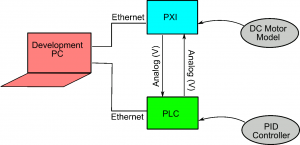
- In the first configuration (Fig.1) there is an engine simulated by means of an EcosimPro model controlled by a physical device, a PLC. Fig.2 shows the cabling between the different elements. In this test, different models with different degrees of complexity were used, in order to see the capacity of the PXI to simulate in real time. The integration step was also modified to take the computational load to the limit. In both cases, satisfactory results were obtained.
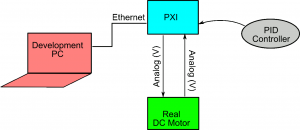
- In the second configuration (Fig.3) a real laboratory engine was used. In this case, an EcosimPro model implemented in a PI control was used for control purposes. The results obtained were adequate and the engine was taken to the desired operating points.
In conclusion, it can be said that the stated goals were attained, i.e., a complete system comprising software elements (EcosimPro model) and physical elements was tested.